1引言
在实际应用中,起重行业有很多起重机需要进行位置控制,例如全自动垃圾吊,电镀车间的工作起重机;有些起重机对位置控制的精度要求还是比较高的,例如长轨焊接基地的轨道吊,核电实验室的起重机等。
一想到位置控制,我们可能立刻想到的方案是使用伺服驱动器,当然伺服系统具有高精度,高反应速度等优点,但是对于起重行业来讲,伺服驱动器的使用还是非常有限的,主要由于:
起重机的驱动功率通常比较大,伺服驱动器和变频器相比,功率越大伺服驱动器的价格劣势越明显。
起重机的工作环境比较恶劣,通常会有灰尘,振动,高热以及腐蚀等环境,会大大影响伺服驱动器的使用效果及寿命。
起重机对位置控制的精度通常不会太高,即便位置精度要求高,但其要求的反应速度一般比较低。

图1 起重行业现场
综上原因,我们完全可以在变频控制器的基础上开发位置控制系统,使用变频器为驱动元件完成位置控制要求,这样既提高了系统的可靠性,又大大降低了成本。
2系统控制要求
如图2所示,在起重机的平移机构中,常见的驱动方式为变频器驱动1到多个电机(典型值为1~6),由于是一拖多的方案,所以电机控制控制方式为开环。在起重机的起升机构中,驱动方式为变频器一对一的驱动单个电机,所以电机控制控制方式为闭环矢量。
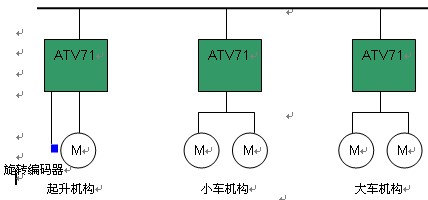
图2 起重行业电机控制方式
平移机构由于是开环驱动,控制精度不高,而且平移机构的轮子和轨道之间还存在滑动,所以通常平移机构的位置精度要求误差小于±20mm,要求较高的场合需要小于±5mm。
起升机构由于是开环驱动,控制精度高,没有机械滑动,所以通常起升机构的位置精度要求误差小于±5mm,要求较高的场合需要小于±1mm。
3系统解决方案
ATV71变频器拖动一个电机进行FVC闭环控制,其位置精度完全能够胜任起重应用场合,只是动态响应性没有伺服系统高,但起重机不需要那么快速的响应速度。
3.1系统结构
通常我们要进行精确的位置控制,需要ATV71变频器和电机做闭环控制,这就需要在电机上安装旋转编码器,ATV71变频器加装编码器卡和ATV-IMC卡。位置控制的主要运算和控制由ATV-IMC/CI卡来执行,系统结构图如图3所示。
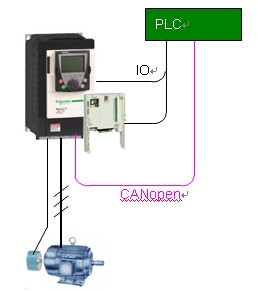
图3 标准方案图
位置控制的命令字以及位置给定等信息由PLC通过CANopen总线(也可以使用Modbus或以太网,如果使用以太网需在变频器上加装以太网卡)发送至ATV-IMC/CI卡,ATV-IMC/CI卡经过计算分析来驱动变频器执行。安装在电机轴上的旋转编码器既作为变频器和电机之间的闭环速度检测,也作为电机轴位置检测的传感器。
图3为标准方案图,位置检测传感器根据实际需要还可以直接和ATV-IMC/CI卡互联。位置检测传感器除了旋转编码器,还有磁尺、格雷母线等。
3.2控制结构和原理
首先,在ATV-IMC/CI中位置控制的设计思路可以参考图4的分析。

图4 时间-速度曲线
按照图4显示,横坐标为时间,纵坐标为速度,梯形的曲线为一段时间内物体的速度曲线,即加速,恒速和减速至0。这样一个过程物体走过多远的距离呢?
根据匀加速运动的公式:
在这里:V0=0;
所以,匀加速和匀减速阶段的距离为:
就是加减速区域的三角形面积
同样,恒速阶段走过的距离是长方形的面积。
所以最终答案是:物体走过的距离是这个梯形的面积.
根据上述的分析,我们在进行位置控制时,首先知道的是需要运行的距离,及梯形的面积,然后我们可以根据实际要求设定加减速时间和最高恒速速度,这样我们就可以计算出物体应该的速度曲线,然后我们控制变频器驱动电机让物体严格按照计算出的速度曲线去运行,就达到了位置控制的目的。
在ATV-IMC中的位置控制软件完全按照伺服系统的方式设计和编写。
具体流程参考图5。

图5 控制设计流程图
首先我们通过"Profile Generator"功能块计算出物体的运行速度曲线,然后控制变频器按照速度曲线输出,将位置传感器反馈的位置值和参考位置值进行比较,PID运算,然后将PID运算的结果叠加到输出速度上进行微调以增加位置控制的精确度。
3.3操作模式
此模块的操作模式比较全:点动模式、回原点操作、给定位置停车、绝对位置控制、相对位置控制、受控停车、速度模式等。可以适合大部分场合的应用。
4应用案例
4.1长轨焊接基地起重机群吊项目
此项目使用了如下=S=变频器产品:
标准变频器ATV71: 0.75-3kW、380V、 64台

图6 长轨焊接基地起重机群吊现场
(1)技术要求
本项目由32台3吨单梁起重机(固定小吊)组成。联合吊运长钢轨,一次吊运1 根。群吊月台长度500 米,每台小吊的距离约为16 米。在月台的中部或端部设有控制室
小车运行速度为20米/分,小车跨度27米,起升速度为8米/分,最大起升高度5米。自动运行时,吊钩的误差不能超过30mm,32台小车运行时需要保持绝对同步。
(2)解决方案
本方案采用ATV71变频器开环控制小车电机,小车位置反馈采用自由轮加旋转编码器的方案,编码器信号直接连接到CI卡上,PLC通过CANopen总线对小车进行控制;图7为单台小车的传动方案。图8为现场自由轮+编码器。

图7 系统构成 图8现场自由轮+编码器
我们在每台小车上都配置了上述系统,所以当32台小车获得运行的位置值时,他们计算出来的速度曲线是一样的,这样在正常情况下,32台小车的运行应该是同步的,当有小车出现故障或不同步时,主PLC会干预处理,屏蔽掉该小车或调整速度,极端情况下全线停车。系统控制方案如图9所示。

图9 系统的控制方案图
(3)控制效果
由于变频器和小车电机之间为开环控制,速度精度较差;所以小车的位控精度最终在15mm,小于项目的技术要求范围。
4.2全自动垃圾起重机
此项目将使用如下=S=变频器产品:
标准变频器ATV71: 15-160kW、380V、6台

图10 全自动垃圾起重机现场
(1)技术要求
起重机采用触摸屏和可编程序控制器(PLC)进行半自动操作和程序控制。各机构驱动使用变频器,根据工艺要求自动调整输出频率和电压,实现起重机的手动和半自动运行。手动操作时在起重机控制室内能够控制起重机移料、给料、堆料等所有动作;半自动操作时,在抓取完成后再根据所设定的投料地址,起重机在程序控制下,自动运行到投料位置,实现开启抓斗,将炉渣投入到料斗中,自动完成投料过程。
由于全自动操作需要对料池进行区域划分,自动定位,自动三维记忆等功能,所以既要求平移机构和起升机构能够有准确的定位,由要求在给定位置到达后吊具不能有过大的晃动,影响工作效率,所以此机型为防摇控制和定位控制的结合应用。
(2)解决方案
我们使用ATV-IMC卡作为实际位控和防摇处理的控制元件,在ATV-IMC卡中我们将防摇和位置控制的功能联合使用;及在高速段我们使用防摇功能来控制,位置控制为辅助功能,在低速段,主要使用位置控制功能。
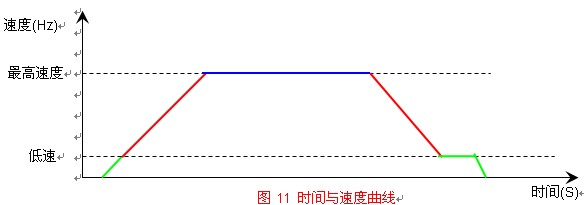
图11 时间与速度曲线
如图11所示,红色的速度曲线为自动防摇激活的区域,绿色和蓝色为自动防摇不激活的区域。对于定位来讲,当起重机运行即将到达指定位置时PLC控制变频器已最低速度运行(尽量的低速)。当位置到达时停车。
图12为起重机的整体方案图。
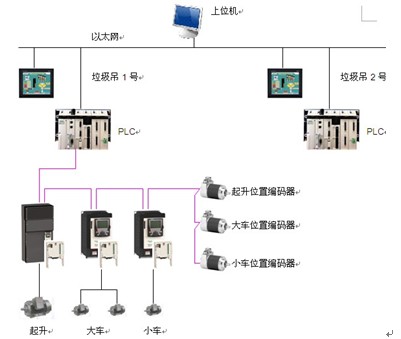
图12 起重机的整体方案
所有机构都安装带CANopen通讯的绝对值编码器,PLC首先获取各编码器的值,然后传输给相应的ATV-IMC卡。ATV-IMC根据运行模式进行实际控制。
5结论
利用ATV-IMC/CI作为控制单元来进行位置控制是变频器功能的一个强大的延伸,由于ATV-IMC或CI可以直接安装于ATV71变频器上,所以这套系统具有不占用安装空间,控制精度高,环境适应能力强等优点,能够在起重行业得到广泛的应用。