【摘要】主要针对锅炉控制系统的特点、控制策略的特点及使用方法、PID控制回路的整定和无扰动切换等方面介绍了力控控制策略在控制系统中的应用。
【关键字】控制策略 实时数据库 算法块 PID 参数整定
一、前言
众所周知,工业过程控制系统的安全性、稳定性、准确性和经济性是企业考虑的重中之重,是衡量系统是否可行的重要指标。随着工业自动化整体技术水平的提高,方案的选择范围增多,但据不同的要求和不同的侧重点,最优方案始终是我们的首选。其中以三维力控自动化监控组态软件为上位机的控制系统中,在保证系统的安全性、准确性和稳定性的同时,也保证了项目投资成本的最小化。
二、系统特点
在锅炉控制系统中,锅炉汽包水位的控制、过热蒸汽的温度控制、燃料量流量的控制和送风流量的控制是控制重点,下面就汽包水位控制过程进行分析,明确控制对象、操作量和被调量等参数,用类似方法可分析其它的控制过程。
锅炉汽包水位控制:汽包水位调节系统的主要任务是使给水量与锅炉蒸发量保持平衡,并维持汽包水位在工艺规定的范围内。由此分析出锅炉的受控变量为汽包水位,操纵变量是给水流量。汽包水位是锅炉运行的主要指标,水位过高或过低都会带来比较严重的后果。所以通常采用三冲量控制方案,即分别对给水流量、蒸汽流量和水位进行控制,控制系统结构如图一示:
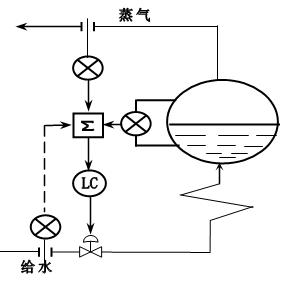
图一 汽包三冲量控制图
三冲量控制实际上是前馈蒸汽流量和串级控制组成的复合控制系统,系统如图二所示,
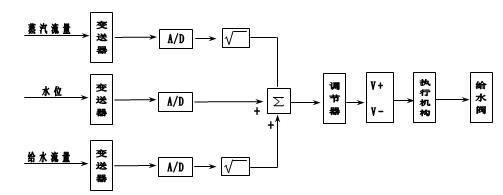
图二 系统图
三、方案设计
明确整个控制流程和控制对像,就可以开始设计方案了。在早的控制系统中多由模拟PID调节器、PLC和智能仪表等完成PID控制;随着工业自动化软件的发展兼各种智能设备、通讯附件功能的完善,充分利用计算机的能力,使本来由硬件完成的功能慢慢转移到计算机处理中,尤其表现在大量数据处理的系统中。目前,多个以力控控制策略为上位机的控制系统已成功运行,系统的结构如图三示:
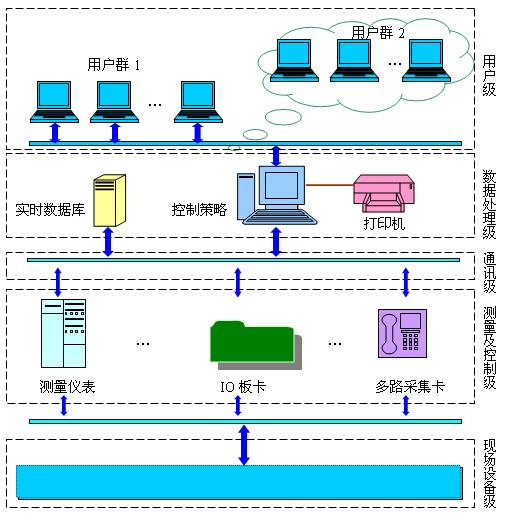
图三 系统结构图
优越性:在传统的锅炉控制系统的方案设计中,通常采用DCS、PLC或智能仪表内部整合的控制算法完成一系列的PID控制,但是仍有它们的不足之处。首先,这些控制设备内部的控制策略修改起来很不方便,有些控制策略在系统运行期间甚至是不允许修改的。其次,这些控制设备的控制能力与它的成本成正比率关系,低廉的设备只能完成一些简单的常规控制,而且逻辑操作速度不高,控制算法种类也偏少。这些缺陷严重制约着设备性能的发挥。而借助力控控制策略丰富的算法,就可以弥补这些设备在运算、控制能力上的不足。
特点:力控控制策略是应用工程运行中的进程之一,与力控实时数据库、IO采集一起构成了整个控制系统,完成采集数据、处理数据及控制输出。所以在系统的设计中实时数据库和控制策略间是交互的,它们之间存在着如何建立连接的问题,即控制策略算法块需要以实时数据库为输入输出,同时实时数据库也需要取得算法块的参数,方便运行中动态修改,如PID控制回路的整定。这样才能确保系统稳定地运行。
四、软件实现
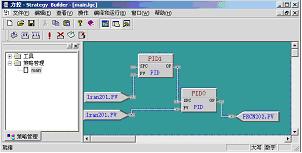
力控控制策略编辑器采用了算法块图的形式,设计简单、操作方便、无需编写脚本,根据系统控制流程就可快速地完成,下面以一个简单的PID控制回路从建立到运行的操作过程为例,具体步骤如下:
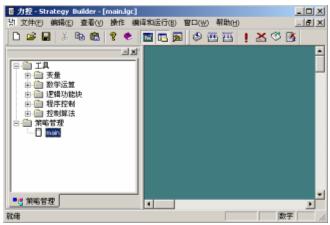
图四 控制策略编辑窗口
说明:
1. 左边是个树型列表
(1)"工具"下是分类的算法块
(2)"策略管理"下是策略窗口
2.右边是当前策略编辑窗口
1.建立数据库变量:运行力控开发系统或者实时数据库开发系统,进入数据库组态环境DbManage,如图所示:
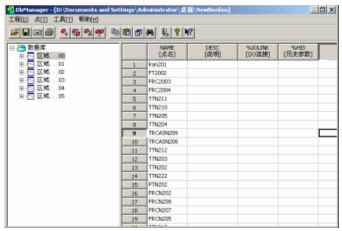
图五 建立数据库IO点
说明:(1).主要功能是将点与设备IO点建立一对一的关系、点参数设置、参数保存方式及其它处理方法;(2).数据库点可分区域、分单元及分组显示,一方面方便自己区分、快速浏览;另一方面方便报警记录查询、总貌浏览和历史曲线查询。
2.建立PID控制回路:进入控制策略编辑窗口,将PID控制器拉至右边策略窗口,或者先点击PID控制器,再点击策略窗口欲绘制算法块的位置。如图六所示:
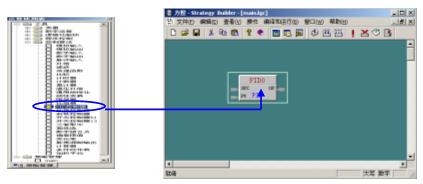
图六 添加PID控制器
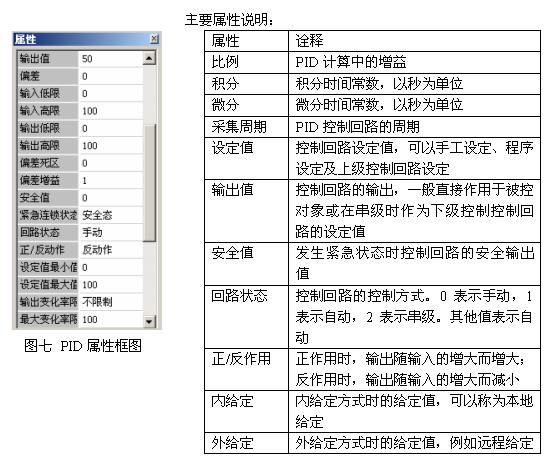
3.设置PID算法块属性及参数,PID算法块的主要属性列表如图七所示:
4.PID控制器的信号输入和输出的连接,具体步骤如下:
4.1绘制PID功能模块一样,绘制数据库输入变量和数据库输出变量,也可以绘制"变量"下的其它的变量块,方法类同,这里仅以数据库变量为例,如图十三所示:
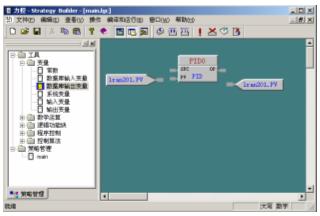
图十三 绘制数据库输入输出块
4.2 正确选择数据库输入输出变量及参数,这些变量都是在数据库中已定义的点,点有很多的参数,变量就是点的某一参数值,选择方法如图十四所示:

图十四 选择数据库变量
4.3 各算法块的连接方法:将鼠标放在算法块端子处,稍停片刻,若为输入端子,则鼠标变成in,若为输出端子,则鼠标变成out,此时,双击鼠标一次,再将鼠标转致另外算法块的端子,双击鼠标,若成功,则两端子间出现白色虚线,将鼠标移致别处,则算法块间出现一条白色实线。如图十五所示:

图十五 已建立连接的算法块
注意:
连完线后,检查是否有虚接现象
4.4 简单的单PID控制回路已经完成,保存,编译。
5.界面组态
控制策略完成后,数据库组态"DBManage"中发生了如下变化:

说明:增加了以算法块为变量点的控制策略区域
5.1 双击PID点,可以查看PID点参数:

图九 PID0点的基本参数属性页
5.2 PID点的参数与PID控制器的属性的对应关系,如表一:
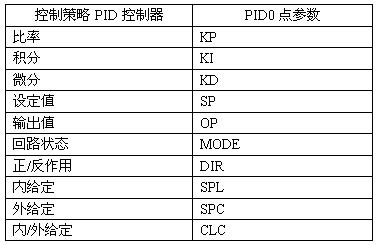
表一 PID点主要参数表
5.3 为方便PID回路的调节,画面设计如下:
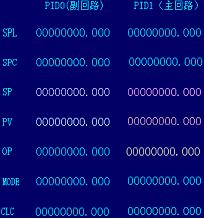
参数详细说明见图七及表一
6.编译、运行

图十 实时数据库和控制策略进程
7.PID调节
PID调节的最终目标是使系统达到稳定状态,使最大动态偏差尽可能小、调节时间最短、调节过程系统输出的误差积分值最小等等,综合这些首先我们必须明确力控PID算法原理和PID对系统调节的影响趋势。
控制算法公式如下:
比例项 = 比例 *(本次偏差 - 上次偏差)
积分项 = 比例 * 偏差 * 采集周期 / 积分时间常数
微分项 = 比例 *微分时间常数 *(本次偏差 - 2*上次偏差 + 上两次偏差)/采集周期
如果是正动作,则:
输出 = 上次输出 + 比例项+ 积分项 + 微分项
如果是反作用,则:
输出 = 上次输出 - 比例项- 积分项 - 微分项
比例系数KP加大使系统的动作灵敏,速度加快,稳态误差减小,KP偏大,振荡次数加多,调节时间加长。KP太大时,系统会趋于不稳定。KP太小,又会使系统的动作缓慢。KP可以选负数,这主要是由执行机构、传感器以控制对象的特性决定的。如果KP的符号选择不当,对象状态(PV值)就会离控制目标的状态(SP值)越来越远,如果出现这样的情况KP的符号就一定要取反;积分控制KI对系统性能的影响:积分作用使系统的稳定性下降,KI小(积分作用强)会使系统不稳定,但能消除稳态误差,提高系统的控制精度;微分控制KD对系统性能的影响:微分作用可以改善动态特性,KD偏大时,超调量较大,调节时间较短。KD偏小时,超调量也较大,调节时间也较长。只有KD合适,才能使超调量偏小,减短调节时间。
8.单PID控制回路的特点及无扰切换
8.1 PID控制回路的特点:
手动控制方式:PID控制器的输出由手动完成,SPL、SPC、SP、PV具有自动跟踪功能目的是使手动到自动无扰动切换,最终稳定在OP值。
自动控制方式:SPL、SPC和SP由操作员设定,PID回路完成PID算法,OP最终稳定在SP值。
8.2 无扰切换方法:
由手动->自动无扰切换:将PID点参数MODE值由0设为1
由自动->手动无扰切换:将PID点参数MODE值由1设为0
9.串级控制回路的特点及无扰切换
对一个PID控制器来讲,有一个输入端为SPC,悬空时构成为简单的单回路控制,若要完成更复杂的控制,如实现外给定或远程给定等。本文以串级控制回路为例,详细说明力控串级控制系统的特点及各种无扰动切换过程,同时我们将更深入地了解PID控制器的几个参数之间存在的相互制约关系。
首先,再建立一个PID控制回路PID1,将PID1的输出OP连接到PID0的SPC端,设置好PID1控制器的属性,主副回路都默认设置为手动方式和内给定,这样就构成了以PID0为副回路、以PID1为主回路的串级控制系统。如图十八示:
补充说明:
系统中对于数据库输出变量算法块增加了一个输出死区属性,这个功能在一定程度上减缓了数据库的变化频率,减轻了系统的负荷,提高了系统的稳定性。
图十八 串级控制回路
控制策略编辑好后,保存并编译。为方便操作PID及无扰动切换,可以在力控开发环境下创建画面窗口,连接主副回路PID点。
9.1 串级控制回路的特点:
副回路没有设置成外给定方式时(副回路PID的CLC值为0),串级回路的特点为:
①主回路只能工作在手动方式:改变副回路的OP值,主回路自动跟踪,使切换到自动为无扰动的,其中主回路的OP值传递给副回路。
②副回路为自动方式时,副回路完成PID算法,主回路的SP值和副回路SPL、SPC和SP一致,处于不变状态。需要一个新的稳定状态时,改变副回路OP值即可。
副回路设置为外给定方式时(副回路PID的CLC值为1),串级回路的特点:
①副回路不能在手动方式下工作
②主回路可以工作在手动、自动控制方式,若有需要,也可将给定方式设定为外给定:
主回路手动方式工作时,改变OP值来控制副回路的给定;主回路自动方式下工作时,设置副回路为串级工作方式,就构成了串级控制回路,主回路的OP传递给副回路的SPC,SPL和SP值自动跟踪。需要建立新的动态平衡时,只需重新设定主回路的SPL值即可
9.2无扰切换方法:
①手动->自动无扰动切换:副回路MODE值由0变为1
②自动->手动无扰动切换:副回路MODE值由1变为0
③自动->串级无扰动切换:副回路CLC由0变为1,主回路MODE由0变为1,副回路MODE由1变为2
④串级->自动无扰动切换:副回路MODE由2变为1,主回路MODE由1变为0,副回路CLC由1变为0。
⑤手动->串级无扰动切换:副回路MODE由0变为1,副回路CLC由0变为1,主回路MODE由0变为1,副回路MODE由1变为2
⑥串级->手动无扰动切换:副回路MODE由2变为1,主回路MODE由1变为0,副回路CLC由1变为0,副回路MODE由1变为0。
10.结束语
力控控制策略将在成本、开放性、灵活性、功能和界面等方面给企业用户提供了最佳的控制系统解决方案。
