摘要:交流传动的纸机在高速运行时,由于系统建模带来的控制偏差对精度的影响随速度升高逐渐增大,采用模糊控制可以摒弃建模偏差的影响。针对传统模糊控制稳态精度差的缺点,采用分段模糊控制,并加入PI 环节抑制稳态颤振,实现了高精度控制;硬件采用贝加莱介司的PCC 。结果表明,该方法接线简单,并通过软件编程实现了模糊控制,节约了硬件,克服了传统PID 控制超调量大的问题。精度高、动态响应快、开放性好、可靠性高,易于工程实砚,为纸机传动控制打下了良好的理论和实验基础。
关键词:造纸机;PCC ;交流调速;摸糊控制;异步电机;转速控制
1 引言
随着工厂生产规模的扩大和自动化程度的提高,交流调速应用越来越广泛,而在造纸、纺织、轧钢等行业大量使用多电机同步传动系统。同步传动控制要求首先解决单电机转速的高精度控制问题,尤其是高速造纸机除了要解决因高速运行而引起的机械共振外,还要求解决电气控制上的间题.这些系统要求对数据传送速率高、输人信号响应快、跟踪误差小、升降速平稳、无超调(或小超调)、稳态精度高。由于异步电动机具有参数时变、严重非线性特性、强藕合性等不确定因素,精确模型难以建立,现有的数学模型也不易于工程实现,变频器要建模也非易事。模糊控制有效地解决了建模困难的问题,使系统具有解耦能力,并且能抑制各种非线性因素对系统的影响,具有强鲁棒性,因此本文选用模糊控制,并采取了相应措施提高了控制精度。
传统的PLC 主要用于开关量控制,很难实现复杂算法。本文在硬件上采用奥地利贝加莱公司的可编程计算机控制器PCC(Programmable Computer Controller) B&R 2005 , B&R 2005面向工业应用,具有强抗干扰能力;模块化的软硬件设计使设计系统具有很好的开放性,节省了硬件元器件和电路,降低了成本,增强了可靠性;B&R 2005 带操作系统,可以用C 和Basic 等高级语言编程,可以实现模糊控制等复杂算法;其操作系统的分时多任务处理方式让控制系统具有了很好的实时性;可以通过现场总线PROFIBUS 、CAN 和以太网通信,通信速率高。本文给出的相关实验数据表明所采用控制方式能达到满意的效果,为高速造纸机传动控制提供了实现方法。
2 模糊控制思路
根据工程实际,采用如图1 所示的模糊控制系统框图。模糊控制能克服传统PID 控制超调量大的间题,但是普通的模糊控制存在稳态精度差和稳态颤振问题。因此,本文采用双模模糊控制,并加人PI 环节,这样施加在被控对象上的控制量u 具有非线胜PID 控制律,提高了稳态精度,有效抑制了颤振现象。
图1 模糊控制系统示意图
3 硬件构成
异步电动机转速控制系统的硬件框图如图2 所示。主控制器采用贝加莱公司的可编程计算机控制器B&R 2005 ,它将工业控制机(IPC )及计算机集散控制系统(DCS )以及可编程逻辑控制器(PLC )融合在一起,主要应用于复杂程度较高的控制对象和过程控制系统。B&R 2005 软硬件均采用模块化设计,具有系统的高速响应,实时性好。更突出的是它带操作系统,可用Basic 和C 等高级语言编程,可以胜任模糊控制算法的编程。它的配置采用12 槽的底板3BP151.41 ,电源模块PS794 , CPU 模块CP260 ,并行处理器模块IF671 ,计数模块NC150。 IF671 提供了485 接口,用于控制变频器;NC150 提供两路光电编码器输人,接电机的转速反馈信号。
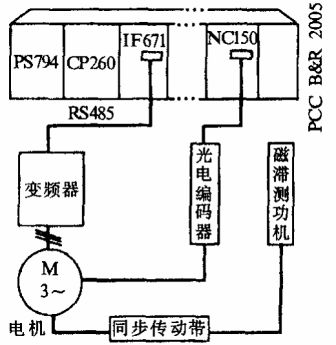
图2 转速模糊控制系统硬件方框图
Fig.2 Hardware configuration of the speed fuzzy control system
变频器采用Slemens 的MicroMaster 6SE3115,功率为2.2kW 。电机采用YVP 90S-4 型三相异步交流电动机,功率为1.1 kW ,额定电流3A ,电压380v , 额定转矩7N·m 。另外采用KZQ 一II 型磁滞测功机控制器,它提供负载转矩,能及时检测和显示电机的转速、转矩、输出功率和效率,并提供数据打印功能和带有接口可以通过计算机的串行口与计算机通讯。测速采用每转600 个脉冲的增量式光电编码器。
4 模糊控制器的改进和设计
4 . 1 语言变量、语言值和论域的选择
模糊控制器的输人语言变量选为电机的实际转速n和给定转速ng之间的误差。e﹦n一ng及其变化率e ,而其输出语言变量可选为控制变频器的给定转速u。这样就为转速控制系统确定了一个双输人单输出的模糊控制器。
输人语言变量误差E 、误差变化EC 以及输出语言变量U 的论域均选为{﹣6 ,﹣5 ,...,﹣1 , 0 , 1 ,...,5 , 6 }。要提高基本模糊控制器的精度和跟踪性能,就必须对语言变量取更多的语言值,即分档越细,性能越好,但同时规则数和系统的计算量也大大增加,影响调试和控制的实时性[1] 。因此,在工程实际应用中必须选择一个合适的分档次数,使得控制系统既能满足控制精度要求和实时性要求,又能易于工程实现。鉴于此,此处E , EC 和U 的语言值均选为PB , PM , PS , ZE , NS , NM , NB 。
4 . 2 语言变量E 、EC和U 的赋值表的建立
语言变量的模糊子集的隶属度函数u(x )究竟选用哪一种好,目前没有统一的理论依据。在工程应用的实际中,通常根据经验和实际控制要求确定模糊隶属度函数。一般情况下,高斯模糊隶属度函数的正态分布特性能满足大部分工程的精度要求和控制性能,所以采用高斯模糊隶属度函数。其数学表达式为
 (1)
(1)
选定隶属度函数拜u(x )的类型之后还得注意它的形状。隶属度函数的形状对控制效果影响很大,如图3 所示,图中窄型隶属函数 反映模糊集合
反映模糊集合 具有高分辨率特性,控制的灵敏度高;宽型隶属函数
具有高分辨率特性,控制的灵敏度高;宽型隶属函数  反映模糊集合
反映模糊集合 具有低分辨率,控制的灵敏度低。一般在系统误差较大的范围内,采用低分辨率隶属函数,而在系统误差较小时,采用具有高
具有低分辨率,控制的灵敏度低。一般在系统误差较大的范围内,采用低分辨率隶属函数,而在系统误差较小时,采用具有高
分辨率隶属函数。确定隶属函数后并根据操作者实际经验修正可得列表格所示的语言变量的赋值表。表1~3 所示的分别是语言变量E , EC 和U 的赋值表。
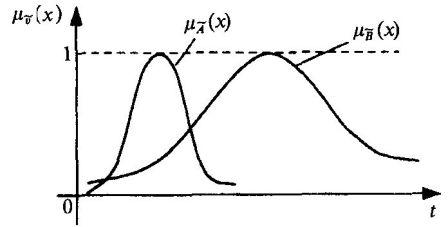
图3 隶属度函数图
Fig.3 The membership functions
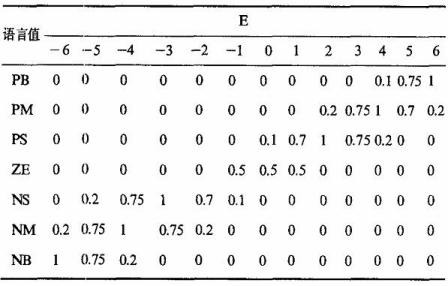
表1 语言变量E 的赋值表
Table 1 The value of language variable E
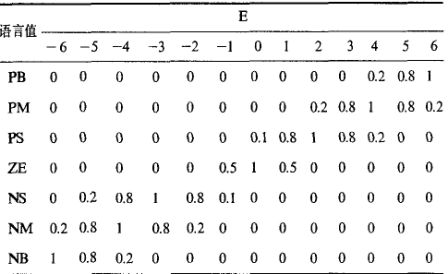
表2 语言变量EC的赋值表
Table 2 The value of language variable EC
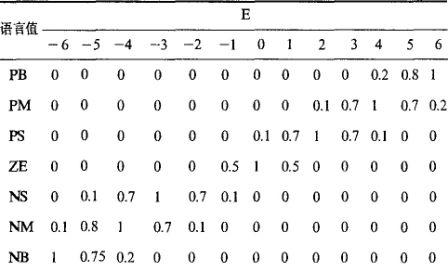
表3 语言变量U的赋值表
Table 3 The value of language variable U
4 . 3 建立模糊控制规律表
将操作者在控制过程中的实践经验加以总结建立模糊控制规则。通过总结操作者手动控制策略,可建立变频器控制的异步电动机转速控制规则的模糊状态表,见表4 所示。
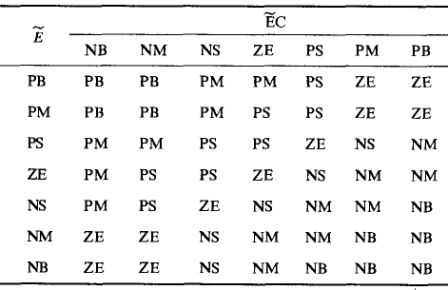
表4 模糊控制规则表
Table 4 rules of fuzzy logic controller
4 . 4 模糊条件推理
① 设有 ,
, ,
, 分别是论域上X、Y 、Z 的模糊子集,则由模糊条件语句"if and then "所决定的模糊关系R 由下式计算出[2]
分别是论域上X、Y 、Z 的模糊子集,则由模糊条件语句"if and then "所决定的模糊关系R 由下式计算出[2]
 (2)
(2)
其中  为模糊关系矩阵
为模糊关系矩阵  构成的nm维列向量,n和m分别是模糊集合 与 的论域元素数。
构成的nm维列向量,n和m分别是模糊集合 与 的论域元素数。
基于推理合成规则,可求得在给定输人模糊集合 1及 1下对应的输出模糊集合 1为
 ( 3 )
( 3 )
其中 为
为 的转置。
的转置。
② 根据表4 中的模糊条件语句确定模糊关系Ri( i = l , 2 ,… ,49 ) ,其中R1 , , ,· ,R49 分别计算为
 (4)
(4)
然后根据公式进行模糊关系的并运算可求得转速控制的总模糊关系 ,即
,即
 (5)
(5)
③ 由语言变量误差E 和误差变化EC 的赋值表,针对论域{﹣6 ,﹣5 ,… ,﹣1 , 0 , l ,… ,5 , 6 }中所有元素的所有组合,根据公式(3 )求取相应的语言变量控制量变化U 的模糊集合,并根据公式(6 )加权平均法去模糊。
 (6)
(6)
其中Xi为论域中的每个元素,uUi ( xi)为其隶属度,平均值x0就是应用加权平均法为模糊集合Uj 求得的判决结果。对x0取整可得对应的实际控制量变化值。计算j = 1 , 2 ,… ,169 所有模糊集合Uj的判决结果,并根据操作者经验修正,便可得如表5 所示的查询表。在实际工程应用中,只将表5 所示的已经算好的查询表存人到控制器内存中查询运算,这样在线的计算量就不大,实时性也有了保证。
4 . 5 量化因子ke、kec 和比例因子ku的确定
在工程实际中,如何根据系统的性能快速确定量化因子ke、kec 和比例因子ku,目前还没有统一的标准。ke、kec和ku三者互相影响和牵制,选择时应综合考虑。ke越大,系统上升速率越快,超调量越大,系统的调节时间增长,严重时会产生振荡乃至不稳定;但ke过小,系统上升速率过小,影响稳态精度。kec越大,系统状态变化的抑制能力越大,增强了系统稳定性;但kec过大,对系统输出上升速率过小,过渡过程时间变长,kec过小,输出上升速率过大,严重时会导致系统产生过大的超调乃至振荡。ku增大,系统响应速度加快,但ku过大会导致超调量大乃至振荡或发散,ku过小,系统输出上升速率较小,快速性变差,稳态精度差。
表5 模糊控制粗查询表
Tahle 5 The outPut value of FC output( e≥50 )

通常的模糊控制器具有非线性PD 控制律,比例因子ke、kec分别相当于模糊控制的比例作用和微分作用的系数。笔者根据工程实际中的调节经验,在模糊控制器的参数确定过程中,首先根
据实际对象所允许的最大稳态误差,按一定比例设定ke、kec、ku﹦1 。首先调整ke,增大ke,每次翻倍,即以2ke ,的速率递增,直至出现振荡,然后返回振荡前一步的值作为ke的值。接着确定kec,增大kec,每次翻倍,即以2kec的速率递增,直至影响系统调节时间超出规定的允许值,然后返回前一步的值作为kec值。适当地增加ku直至系统出现振荡。最后再根据实际控制情况微调,在异步电动机的转速模糊控制过程中,最终确定ke﹦0.01667,kec﹦0.1,ku﹦2,ki﹦0.8 。
4 . 6 提高稳态精度并考虑克服颤振
根据上述模糊查询表控制的异步电机转速误差大,而且存在颤振现象。为解决精度和颤振的问题,首先将控制分段,在转速误差e≥50 时,仍然采用表5 所示的查询表;而在e≤50 时采用表6 所示的细调查询表,此查询表对应的ke﹦0.35 , ku ﹦0.25 ,ki﹦0.5 。同时将输出U 经过PI 比例积分环节。经过调整措施后,系统的控制性能大大改善,有效抑制了颤振,精度大大提升,稳态精度控制在8‰之内。表7 、表8 分别给出了粗调后和细调后的异步电机转速模糊控制的误差和调节时间等有关数据。图4 给出了实验结果。实验表明:模糊控制较PID 调节具有更好的动态响应性能,超调量小;而带PI 环节的分段模糊控制比经典模糊控制具有更好的稳态性能,而动态性能却相差无几。
表6 模糊控制细查询表
Table 6 The output value of FC ( e < 50 )
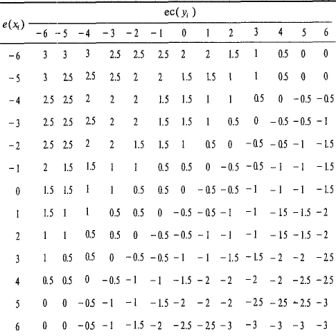
表7 转速模糊控制粗调后的相关数据
Table 7 The results of fuzzy controller

表8 转速模糊控制细调后的相关数据
Table 8 The results of revised fuzzy controller
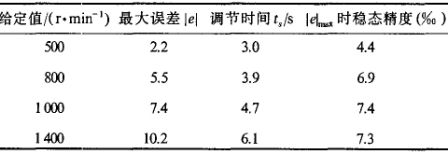
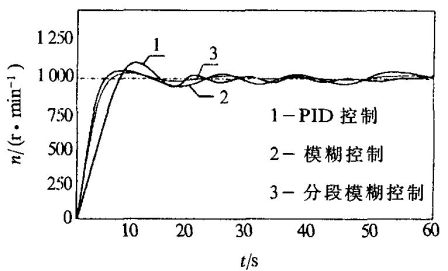
图4 速度的PID 控制和模糊控制的实验结果
Fig.4 The results of control experiment
5 软件设计
B&R 20O5 型PCC 带分时多任务的操作系统,可以用Automation Studio Basic 或C 语言编程,这为模糊控制提供了可能。本文采用Automation Studio Basic 编程。变频器通过RS485 控制,由于不具有标准通信协议,这里利用PCC 带的帧驱动开发功能,开发了PCC 和变频器的通信协议。转速采样通过NC150 ,可软件设定倍频数,这里设定为正4 倍频。转速采样和滤波作为一个任 务、通信作为一个任务,模糊控制作为一个,分别放在3 个软件模块中。普通的PLC 各个任务都在同一个循环周期内,由于用于通信的任务占用的循环时间较多,导致整个系统的循环时间超过采样任务所要求的循环时间,这就难以保证通信任务数据采集的实时性;而且就PLC 而言,如果用户有新的要求,则需要改变整个程序。PCC 则可以发挥软件模块化的优势,只修改相应的部分。这里只介绍模糊控制的编程思路。将表5 和表6 中的数据存在内存中,然后根据实际采样值查询[3] ,查得的控制量变化乘以比例因子加到模糊控制输出上,然后经过PI 环节输出。模糊控制模块的流程图如图5 所示。
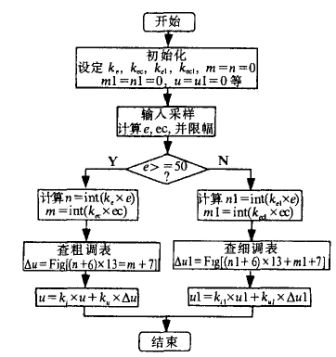
图5 软件流程图
Fig.5 Software block diagram
值得指出的是,高速造纸机传动控制系统要求车速稳态运行精度达到1‰及更高,本控制系统之所以没有达到这个标准,分析其原因有3 方面:① 虽然采用B&R 2005 型可编程计算机控制器,可采用现场总线连接,通信速率高,但本实验限于变频器的通信方式RS 一485 和最高通信速率19.2 kbit/s 的限制,数据传输速率低,导致系统响应慢;② 采用Siemens变频器MicroMaster 6SE3115 ,分辨率低,控制精度低; ③ 限于实验设备,采用了600 个脉冲/转的光电编码器,精度低,高速纸机应采用1024 个脉冲/转及以上的编码器。这些问题不影响模糊控制能提高控制精度和获得良好的启动性能的结论。在实际高速纸机应用中可通过选取高性能的变频器和编码器来解决。
6 结束语
同步传动控制系统要求首先解决单台电机转速的高精度控制问题,尤其是高速造纸机要求车速稳态运行精度达到l‰及更高,并且需要优良的启动性能。模糊控制有效地解决了异步电动机拖动系统建模困难的问题,克服了传统PID 控制超调量大的缺点,更适合造纸机升降速平稳、无超调的控制方式。采用双模模糊控制,提高了控制的稳态精度。为了便于工程实现,本文采用查询表的方式,提高了控制的实时性并加入PI环节,这使得施加在被控对象上的控制量u 具有非线性PID 控制律,提高了精度,有效抑制了颤振现象。采用面向工业应用的可编程计算机控制器B&R 2005 ,由于带分时多任务的操作系统,模块化的软硬件设计,采用高级语言编程,节省了成本,增强了系统控制实时性、可靠性,使系统具有良好的开放性,为高速造纸机传动控制系统打好了理论和实验基础。关于多电机同步传动模糊控制系统,需要对速度控制,张力控制和负荷分配作综合考虑,由于篇幅限制在此不再详述,作者将另文研究。
参考文献:
[1] 诸静.模糊控制原理及应用[M] .北京:机械工业出版社,1995
[2] 章卫国,杨向忠.摸糊控制理论与应用[M] .西安:西北工业大学出版社,1999
[3] 黎浩荣,李立勤,李东海,等.对一种高精度模糊控制方案的研究与改进[j].清华大学
(自然科学版),2000, 40(2) : 114 一117
作者简介:汪明(1976).男,山东大学硕士研究生,主要研究方向是工业过程的建模,计算机控制技术等;
张承慧(1963),男,博士,教授,博士生导师,主要研究方向是参数估计及运动控制技术;
崔纳新(1968),女,博士研究生,副教授,研究方向为智能控制、电力电子与电力传动。
作者:汪明1,张承慧2 ,崔纳新2
( l.山东建筑工程学院信息与电气工程系,山东济南250014;2.山东大学控制科学与工程学院,山东济南25006l )