1 前言
晶振用一种能把电能和机械能相互转化的晶体在共振的状态下工作,以提供稳定,精确的单频振荡。在通常工作条件下,普通的晶振频率绝对精度可达百万分之五十。高级的精度更高。有些晶振还可以由外加电压在一定范围内调整频率,称为压控振荡器(VCO)。 晶振的作用是为系统提供基本的时钟信号。通常一个系统共用一个晶振,便于各部分保持同步。有些通讯系统的基频和射频使用不同的晶振,而通过电子调整频率的方法保持同步。
音叉多线切割机是用于替代多刀切割机加工晶振启振音叉的设备。音叉多线切割机相对多刀切割机优点:1、加工效率高10倍;2、耗材低;3、精度高,无需进行二次加工做研磨;4、经济效益高,一次可切割上千个音叉。由于普通指令无法满足现场需求,因此只有通过简单逻辑指令开发高阶PID算法。
2 系统控制框图及说明
设备框图及工艺要求如图1。

图1 设备框图及工艺要求
音叉多线切割是一种通过金属丝的高速往复运动,把磨料带入半导体加工区域进行研磨,将晶体一次同时切割为数千片薄片的一种新型切割加工方法。因此该套设备的难点是收放线轴与主轴高速同步保持不断线,并且保证恒定张力。高速同步保证是通过收放线张力伺服编码器反馈输出值与给定值差,通过高阶PID算法调整收放线轴速度,从而保证恒定张力。
3 配置方案选型及程序
该设备一共有八颗伺服,因此控制器选用台达10MC总线运动控制器,如图2所示。
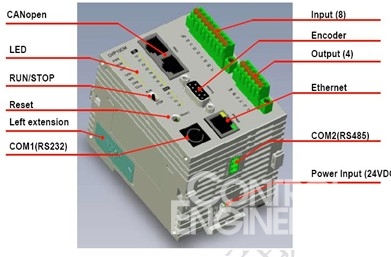
图2 台达10MC总线运动控制器
DVP10MC11T是台达自主研发的基于CANopen现场总线的多轴运动控制器,它遵循CANopen DS301基本通讯协议和DSP402运动控制协议,同时还支持大部分国际组织所定义的运动控制标准指令库,极大方便使用者快速入门,迅速的进行项目开发。
DVP10MC11T 是一个多功能控制器,其内部包含标准PLC 模块和MC 运动控制模块两大功能模块(如图2)。PLC模块与台达其它DVP系列PLC功能相似,使用方法也相同,通过WPLSoft或ISPSoft 编程软件,可以编写梯形图,顺序功能图,指令表等台达标准的PLC 逻辑程序。PLC 模块同时还支持左侧和右侧两个扩展接口,左侧为高速并行扩展口,可以连接最多7台现场总线主站模块(DeviceNet,CANopen主站等)、以太网模块及高速模拟量模块等,右侧用来连接原DVP-S系列PLC的扩展模块(如低速模拟量及数字量模块)。MC运动控制模块主要通过CANopen总线,对伺服驱动器进行精密的控制,以完成用户所期望的速度控制、位置控制等功能。MC 运动控制模块采用CANopenBuilder 软件进行运动控制编程,来实现各种复杂的运动控制任务,运动控制语言以图形化的方式提供用户编写运动控制功能,使用简洁,易于学习理解。
10MC控制器是CANopen总线控制器,台达A2-M伺服支持CANopen通讯。与10MC控制器配套选用。配线大大简化、控制更加精确,能够满足高端设备的应用需求。
4 设置各个轴的轴参数

图3 控制结构图

图4 各轴伺服参数
5 数学模型建立
5.1 PID控制系统
连续一时间PID控制系统如图所示。图5中,D(s)为控制器。在PID控制系统中,D(s)完成PID控制规律,称为PID控制器。PID控制器是一种线性控制器,用输出量y(t)和给定量r(t)之间的误差的时间函数e(t)=r(t)-y(t)。
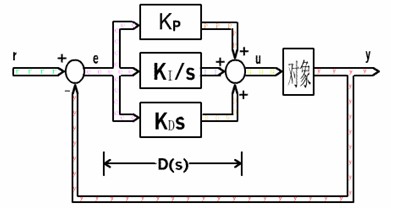
图5 PID控制
图中的比例,积分,微分的线性组合,构成控制量u(t)称为比例(Proportional),积分(Integrating),微分(Differentiation)控制,简称PID控制。
5.2增量算法
当执行机构需要的不是控制量的绝对值,而是控制量的增量(例如去驱动步进电动机)时,需要用PID的"增量算法"。

图6 PID增量控制
由位置算法求出:
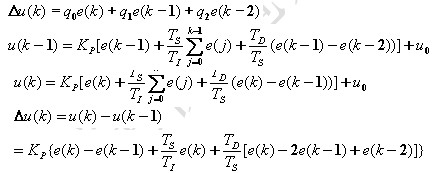
两式相减,得出控制量的增量算法式称为增量式PID算法。
式中已看不出是PID的表达式了,也看不出P、I、D作用的直接关系,只表示了各次误差量对控制作用的影响。从式中看出,数字增量式PID算法,只要贮存最近的三个误差采样e(k)、e(k-1)、e(k-2)就足够了。程序如图7、图8。

图7 程序图
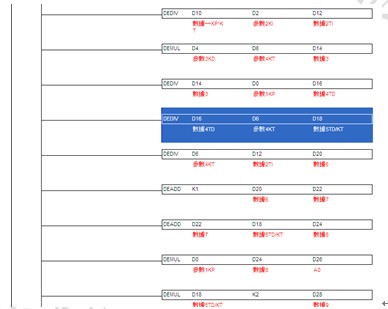
图8 程序图
3 离散化增量式PID算法的数据监控
根据PID算法模型,高速运行时,收线放线伺服输出偏差正负5转以及张力摆动扭矩正负1牛。同时监视主轴、张力、放线伺服的波形如图9、图10和图11。
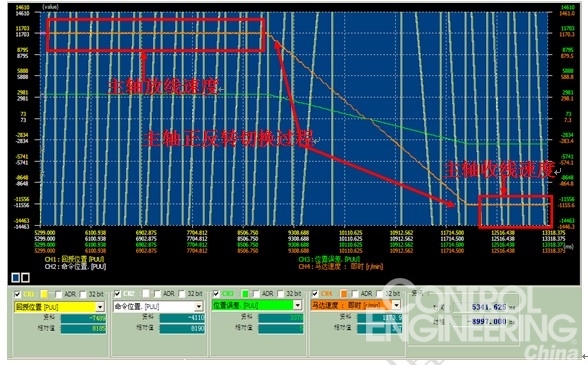
图9 主轴波形图

图10 张力伺服的波形图
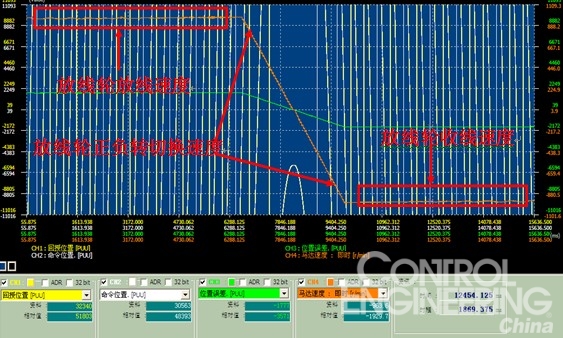
图11 放线伺服的波形图
通过监视波形,在张力轮的角度发生偏差后,收放线速度能够快速的进行改变,保持张力轮稳定在一个相对固定的位置。由此可知,离散增量式PID算法在这种快速响应的控制系统中是可行的。
6 结束语
中达电通主要为中国最具成长潜力的通信及自动化市场提供设备和服务。其主要产品和服务包括视讯设备、动力系统、宽带数据和机电自动化四个方面。中达电通的母公司为世界著名的电子制造跨国企业--台达电子集团,台达集团在江苏吴江建有规模庞大的生产基地,是全球第一大电源管理系统供货商和台达变频器、编码器、人机界面、PLC、伺服、温控器等机电产品的制造厂商。作为工控行业内的知名厂商,尤其是在国内唯一一家能将机电产品做的如此全面的制造厂家,我们通过应用自己的产品能够为各行各业的客户提供全面的解决方案。 最佳的产品性价比、周到完善的全国乃至全球联保服务能够保证客户利益。中达电通的服务体系遍布全国。
经过客户各种岗位人员测试,此算法未出现任何没有出现任何异常,满足客户各种操作要求以及傻瓜相机式的设计。