在食品行业中有些包装膜包装前必须要打孔,否则在热封后,完全封闭则会包含很多空气,不利于运输。原来的应用情况是包装膜和包装原料的运送速度保持一致,使用一种特殊的极快速气缸对运动中的包装膜进行打孔。但使用这种汽缸由于运行动作频繁,所以很容易受到损坏,维修成本非常高。而且这种气缸的订货周期长、价格不菲,对许多企业来说是一笔很大的支出。为了降低成本,厂家急需一种简单耐用的打孔设备替代品。
在包装膜打孔机上使用台达20PM的正是可以满足这种要求的极佳解决方案。
在新型包装膜打孔机上使用20PM控制交流伺服电机,带动其机械结构左右运动。在运动时实现中间部分包装膜的绝对静止,此时进行气缸打孔操作(图1)。
使用此结构设备,可实现前后送膜并不停止,只中间部分包装膜停止的效果。
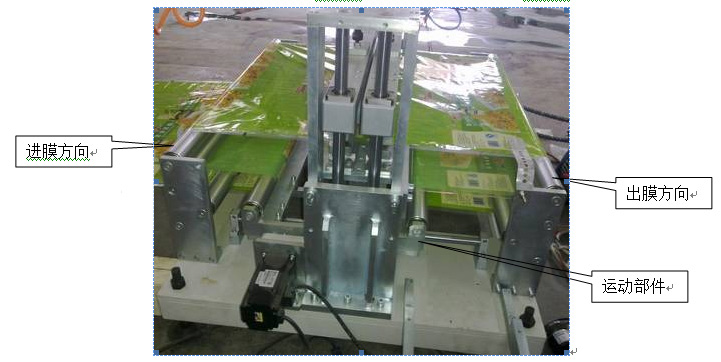
图1 设备外观
系统构成
控制系统使用全系列台达产品,具体配置如图2所示。

图2 系统配置
控制分析
此设备的控制要点有2个:第一、使机械运动部件跟随送膜速度变化,以实现绝对静止,使用电子凸轮的追剪功能。使用色标信号来控制凸轮运动与否,所以使用非周期凸轮模式;第二、打孔位置方便调整。
1、追剪功能
程序中使用自动建立追剪CAM DATA机制。自动追剪功能是靠2个飞剪指令语句生成。飞剪功能语句定义如图3、图4显示。

图3
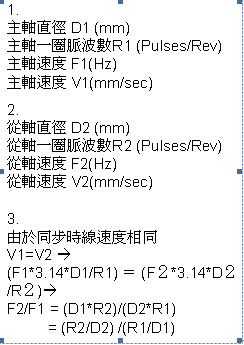
图4
在此设备控制中,同步时的线速度并不是相等的,而是V1=2*V2。
第一个飞剪语句按照上面格式设定。第二个飞剪语句的D102、D103从轴长度设置成第一个语句的负值,D111 CAM曲线设置成H8000,这样即可使用2个飞剪自动达到追剪功能。
执行语句,生成的CAM曲线如图5所示。
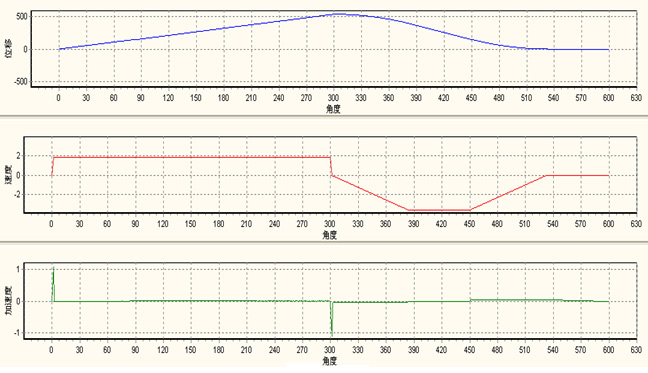
图5 CAM曲线图
非周期凸轮控制框架如图6所示。
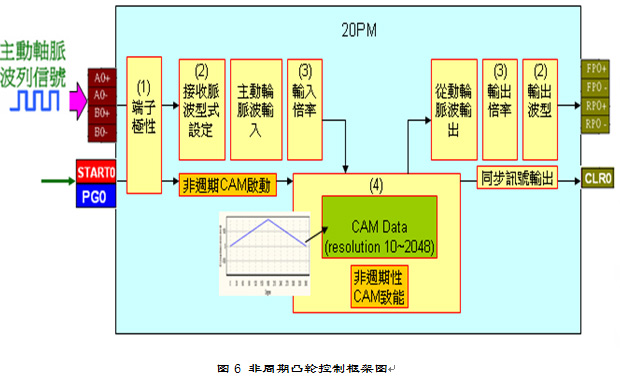
图6 非周期凸轮控制框架图
2.高速比较与捕捉
由于色标传感器有信号时并不是要打孔的位置,所以并不能使用色标信号当作非周期凸轮的启动信号。所以把主轴编码器信号并联接到MPG1,设定2个高速计较和1个高速捕捉,并启动C204。使用色标信号当作高速捕捉信号,每次色标信号来后,捕捉C204当前值。然后用C204当前值加上要延时的脉冲数(即打孔位置调整值),用2个高速比较来控制CLR1的导通和关断。再使用CLR1信号来触发START0,启动非周期凸轮。
高速比较与捕捉设定如图7、图8、图9所示。
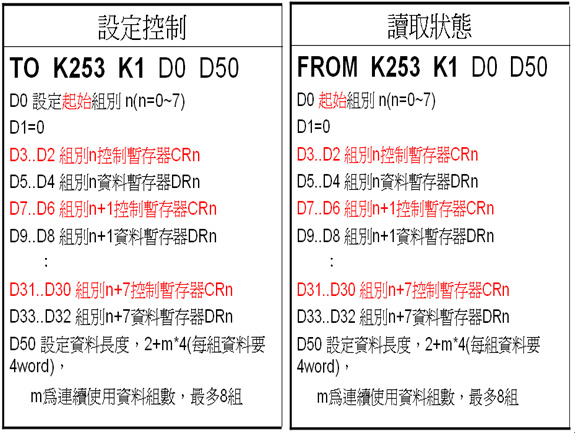
图7

图8
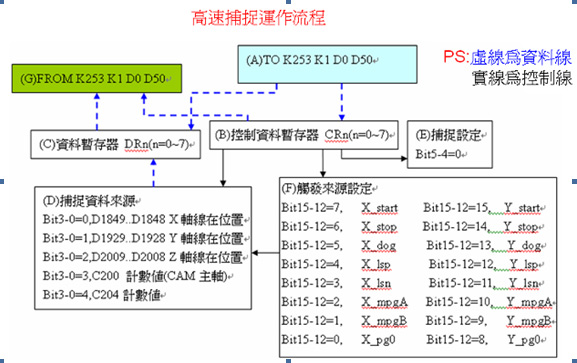
图9
控制程序
1.参数初始化(图10)。
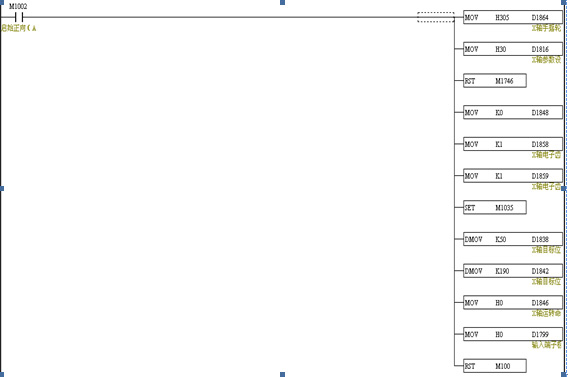
图10
2.飞剪曲线建立(图11、图12)。
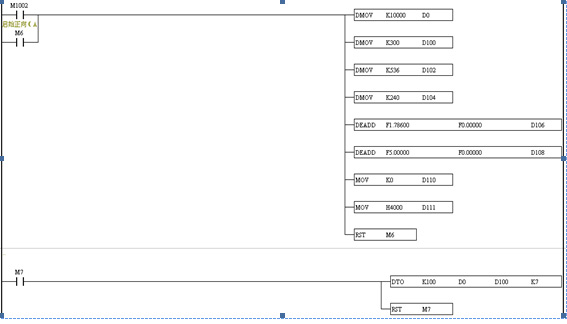
图11
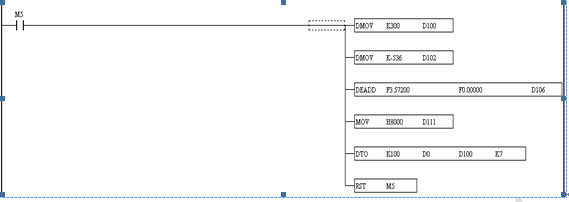
图12
3.高速比较与捕捉设定(图13、图14)。
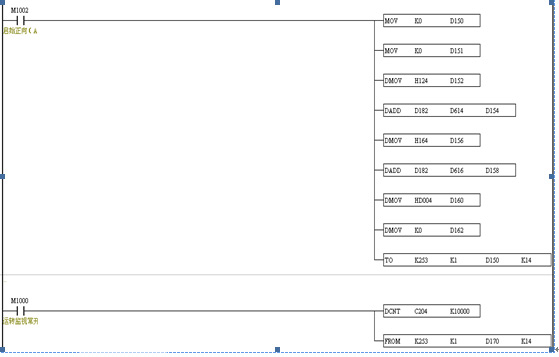
图13
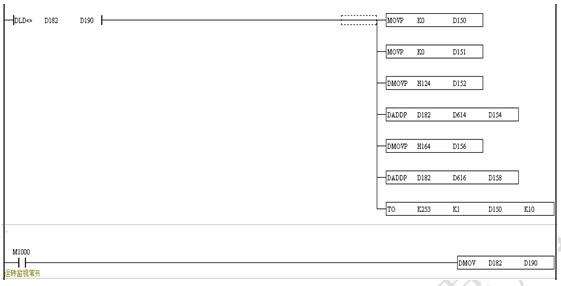
图14
结束语
目前设备运行良好,无论包装膜传输速度快、慢,都能准确进行打孔。而且在文本控制器上可以方便的调整打孔位置。客户非常满意其打孔效果,准备替换所有生产线上类似设备。