多年以来,对机械手进行动力学建模是学术圈当中的一个已知方法。它通常被用作机器人和工程实验室的一个工具,用于研发仿真机器人与高级控制算法、运动模拟以及其他学术追求。动力学建模涉及数学公式的开发,用于描述机器人的动态特性,比如惯性、质量、重心以及无法方便加以测量的其他特性。虽然频繁地被用于理论研究,但是,使用动力学建模方法来改善机器人控制一直以来被工业机器人开发者和制造商所忽视。
Servotronix首先对动力学建模的潜力进行了考虑,以便解决一家高速Delta机器人制造商所经历的性能问题。该种机器人被应用于半导体行业。
使用机器人的太阳能晶元处理应用,要求高加速性能和极高的精确性。但由于其固有的脆性结构,因而Delta机械手非常容易断裂。此外,它还对昂贵的生产负载与生产材料构成撞击和损坏的威胁。

Delta机器人对自身和负载都会构成损伤风险
在某些系统当中,机械手的增量运动是以通过球形接头连接到移动平台和臂连杆的机械平行四边形为基础的。如果超出了某些位置或角度,那么导致机械手解体所需的力将会大幅降低,如果发生碰撞或强力推拉,机械手可能会非常容易发生解体。让这种情形进一步复杂化的是,这些断裂点通常位于伸出位置,这些位置具有撞击到某些障碍物的极大风险。如果在机械手分解之后,其所造成的撞击后果仍然未被发现,那将可能会造成进一步的损害。
为了克服这些缺点,对Delta机械手更好地加以控制,Servotronix的工程师采用了动力学模型并对其进行了强化,而动力学模型的源头正是来自学术研究。
由此所产生的模型,或者描述Delta机械手的算法集,还仅仅是故事的一半。
这是因为模型具有通用性。但由于机器人具有不同的尺寸和质量,因此实际参数值将会有所不同。虽然机器人的运动学原理都是相同的,但是各机器人的物理特性是不同的。即使是在某个已经制造的机器人系列当中,每种机器人的物理特性也可能会略有不同,并将会对性能产生不同影响。
一旦已经对机器人系统进行建模,就需要获取动力学参数的准确数值。Servotronix通过开发额外算法来实现这一点,以便自动确定运动学和动力学参数。
虽然有些参数,比如机器人臂连杆的几何尺寸,可以方便地加以测量并应用到公式当中,但其他参数值,比如每个连杆的重心,是通过自动识别程序来加以确定的。
在识别过程中,机器人将会随机移动,动力学参数的数值是通过Servotronix的识别算法来加以确定。内部和外部要素都被纳入到计算当中,比如形状、材料、电缆以及摩擦等。
由于模型控制Delta机器人的成功实施,Servotronix进一步针对其他类型的机器人开发了动力学模型,比如SCARA机器人,4轴横臂机器人,以及5轴伽利略球形机器人。本公司认识到,可以通过动力学建模来满足对于机器人更高输出、更快速度以及更低成本的日益增长的需求。

对一个5轴伽利略球形机器人建立动力学模型
通过使用动力学模型,Servotronix客户的机器人已经实现了更快的稳定时间和更好的运动轨迹控制。该种方法还有一个附带的好处,那就是可以通过机械参数,特别是摩擦常数随时间的变化,来检测系统的磨损情况。
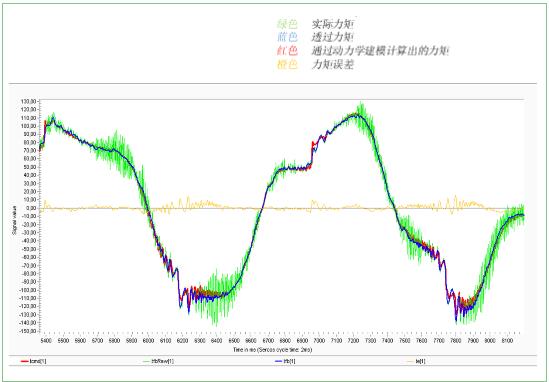
正如力矩误差所显示的那样,计算出来的力矩值几乎准确预测了透过力矩值
如今,基于模型的控制已经是Servotronix softMC多轴控制器的一个内置功能。其有效性将通过一条实时运动总线系统最终得以实现。EtherCAT可以让Servotronix softMC多轴控制器每毫秒更新驱动数值,在每次采样过程中,softMC都会向驱动器发送,并从驱动器接收命令以及反馈的力矩值,以及标准的位置和速度值。softMC通常与Servotronix CDHD伺服驱动器匹配使用。可以对softMC进行设置,以便将接收到的力矩当作一个附加值,作为自行计算力矩值的一个补充。

采用了模型控制以及实时EtherCAT运动总线的Servotronix softMC 3 和 softMC 7(由左至右)多轴运动控制器
模型控制的直接好处就是,正如Delta机器人案例所展示的那样,可以检测和避免碰撞,从而使负载、工作区以及操作员获得更好的保护。此外,它还可以消除对于力传感器的需求,从而可以简化系统设计,降低成本。
这种控制方法最显著的好处,就是更强的机器人行为能力和驱动性能。由于到达某个位置所需要的力矩能够以更高的精度加以计算和控制,从而可以使机器人的运动路径获得高度优化。所需要的电流也更加平稳,因为电流数据可以通过计算得出,而非简单地通过反馈回路加以获取,从而提供了更好的速度控制,减少了机械手发生抖动或骤然运动的可能。
通过对机器人在运动过程中所需的力矩和力进行评估,并防止出现过度力矩,可以方便安全地增加机器人的速度,同时缩短振荡和稳定时间。最终结果就是,基于模型的控制可以让系统运动得更加快速和准确,实现更高的处理能力。
