海尚集团成功研发的矢量摆线(SD)减速机技术是全球第四大机器人关节减速机技术,填补了国内高端精密减速机的技术空白,该技术设计原理不是用齿轮做传动,而是均布钢球依摆线槽在槽内做滚动传动,使用输入轴(偏心轴)作为轨迹发生器,经差动变速器配合输入轴偏心运动完成输出从而实现减速,以十字滑块为驱动板达到零背隙,提了传动精度和传递效率,牵一发而动全身,实现了绝对摆线,输入功率平均分配,均匀负载,无受力死角。
以创新的设计理念,独特的加工工艺和精密的加工检测设备,辅以专用的装配工装和机械手来共同打造完成的,它整合了RV减速机和谐波减速机的刚度好、精度/效率高、速比范围广、噪音低、寿命长、体积小、扭矩大等特点 。它的应用非常广,它适用于机器人产业领域全系列;新能源汽车驱动;高精密机床及自动化生产线设备;军工等领域,性能和外形尺寸完全可替代RV和谐波减速机。
1)不采用齿轮做传动,使用输入轴(偏心轴)作为轨迹发生器,经过差动变速器由随动板、第一、第二交叉滚柱配合输入轴偏心运动完成输出来实现减速。
2)具有结构紧凑、噪音低、重量轻、体积小、零间隙、传动平稳、输出精度高等优点,传动效率高达93%以上。
3)实现减速机输出平稳 ,机械磨损率低,消除原减速机S形摆线槽或十字滑块设计缺陷。
4)通过随动板、第一、第二交叉滚柱、差动变速器实现自动调整输入轴(偏心轴) 的运动与偏心量完全吻合,减速机的传动滚珠(运动)和差动变速器轨迹完全吻合。
5)采用球珠结构有利于热传导,降低减速机温升、噪音,提高使用寿命。
1)零背隙
内部采用滚珠摆线,达到零背隙运行。
2)无死角
摆线运动轨迹,实现无死角运转。
3)全接触
所有钢球同时参与啮合运动,重合度高,传动平稳,传动精度高。
4)中空设计
①大中空设计,配合伺服取代传统行星减速机,
②可有效整合电机设计。
5)高钢性
运用矢量摆线全接触的方式传动,摆线槽和所有滚珠同时啮合,使其具备高刚性、耐过载的特点。
6)高精度
由于旋转振动、惯性小,具有良好的加速性能,可实现平稳运转并获取正确位置的精度。
7)低噪音
开创性地采用了双摆线差动变速方式输出,能将工作噪音低至60分贝。
8)长寿命
采用球珠取代滚柱有利于热传导,避免了磨损率增高,设计寿命长达80000小时。
9)高效率
传动效率达80%~90%。
10)宽速比
11)低温升
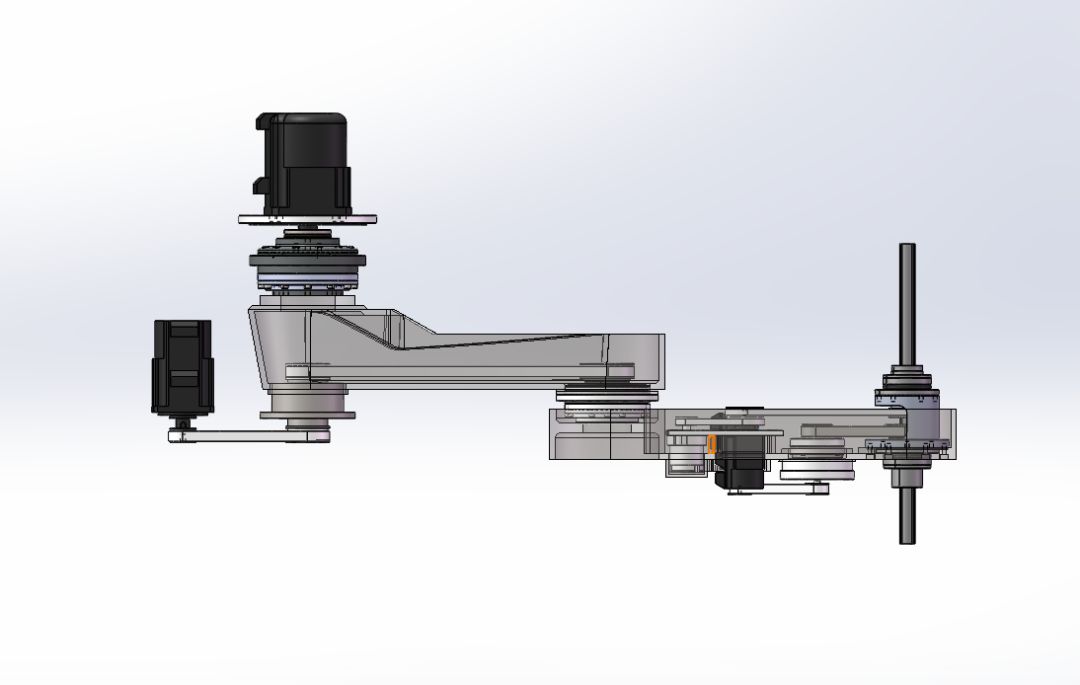
SCARA 机器人机械结构
一种典型高速的 SCARA 机器人机械结构(如图所示)
细节设计
1) 矢量摆线减速机的安装必须要完全定位:以减速机法兰端面为轴向定位基准。以减速机外径为径向定位尺寸。
2)矢量摆线减速机与安装底座应注意避免干涉。
3)注意安装螺钉长度。
4)减速机本体上的螺钉不能拆卸。
5)注意矢量摆线减速机相配零件的形位公差。
① 与矢量摆线减速机连接固定的安装平面形位公差为:平面度0.02mm、垂直度0.02mm,螺纹孔或者通孔位置度0.1mm。
② 尽量减少需相配合零件的数量,防止尺寸链过长产生的累积误差。
6)过渡法兰止口公差配合。
矢量摆线减速机与伺服电机共有 3 处公差配合,如图中①②③所示。为了防止“过定位”,需要将过渡法兰止口公差放大。
加工工艺要求
矢量摆线减速机对回转轴线的倾斜非常敏感,故加工时必须考虑合适的工艺方案,尤其要保证相应的形位公差。
装配工艺要求
1)装配环境要求
矢量摆线减速机必须在足够清洁的环境下安装,安装过程中不能有任何异物进入减速机内部,以免使用过程中造成减速机的损坏。
2)装配工具
包括相应规格的扭矩扳手、定量加油器具、无尘纸、密封胶等。
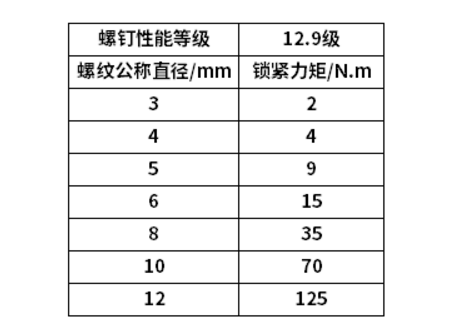
3)装配要点
矢量摆线减速机安装时,螺钉以十字交叉的方式锁紧,以 4-5 次均等递增加力至螺钉对应锁紧,完成以后将电机设定100r/min运行,检查有无异响。