概述
欧氏空间望远镜是为高分辨率光学检测而优化的干涉仪仪器,利用对成孔径技术对地理静态轨道进行检测。
为了获得需要的同相位、所需的分辨率,就要使用复杂的计量和控制系统,以便确保光学配置具有必要的稳定性。集成了一个演示器(称为MIT,Michelson 干涉仪测试台)用于对欧氏空间望远镜的两个关键系统进行验证,以便达到同相位条件,以及在Michelson干涉仪仪器中达到的稳定边缘图案样式。
本文包含了对欧氏空间望远镜的概述、MIT性能的简单描述以及完成的目标。
欧氏空间望远镜
例如欧氏空间望远镜等多孔径望远镜配置为达到大型孔径光学系统提出了一种独特的可行方法。开发多个独立望远镜孔径的动机是为了提供从空间进行高分辨率的观测,避免在大型孔径(大重量)情况下以及使用自适应波前控制导致的局限性。多个望远镜光学镜片可以比单筒大型镜片直径缩小许多,这是在重量以及外形上的重要改进。
带有Fizeau 类型组合光学配置的Michelson 干涉仪被选用实现合成孔径技术。望远镜配置包含了八个子望远镜阵列和光束组合望远镜位于阵列的中央,用来采集来自子望远镜的光线,并且可以在聚焦平面上产生干涉图像。光学延迟线可以均衡来自每个子望远镜不同波前进入路径的差别,最后到达覆盖在上面的聚焦平面。干涉边缘图案样式在聚焦平面上形成,并且具有良好的可见度,在干涉仪臂之间的光学路径差(OPD)被保持在比相干长度小的范围之内。随着OPD 的增加,边缘图案变得越来越黯淡,即其可见度越来越低。这是因为干涉仪并非工作在单一的波长上,而是工作在有限的频带上。
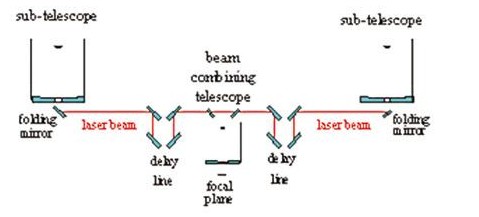
图1.Michelson 干涉仪的计量线
为了让边缘图案具有更好的可见度,光束经过Michelson干涉仪八个臂的光学路径长度(OPL)必须进行均衡,其误差需要在工作频带相干长度的范围之内。对于一定的Michelson 干涉仪任务而言,经过八个臂的光束的OPL必须将误差均衡在100 nm之内。如果达到了这个条件,就可以称为干涉仪达到了“同相位”。在达到同相位条件之后,就可以使用望远镜进行观测。在聚焦平面的图像集成时间之内,干涉仪的八个臂之间的OPD 必须控制在观测波长范围之内(即OPDij < 10 nm),以便避免边界“跳跃”或是边界模式相位出现较大变化,造成得到的图形出现对比度损失。如果这种情况在观测过程中出现,得到的干涉仪图像就会完全模糊,为了重建目标原始图像所需的必要信息也将丢失。
干涉仪带有激光计量系统,以便测量干涉仪臂之间的光学路径差(绝对差和相对差),从而使用电动延迟线控制光学路径差。控制系统可以对激光干涉仪进行测量,将指令发送到延迟线上。
激光干涉法是至今为止用于测量长距离变化的最佳方法。可以使用多种干涉方法,但是所有方法都是基于干涉原理的:由同一个光源发出的两束或多束光线通过不同长度的路径最终交汇(汇聚)在用于测量光强的探测器上。探测器上的光强是干涉光线(波)的相对相位的函数,他们可以相互增强,也可以相互减弱。在对干涉信号的分析中,可以得出关于不同光束路径差的信息。为了测量光学干涉仪两个臂之间的长度差,最终的方法就是使用Michelson类型的激光干涉仪。激光干涉仪包括两种类型的激光计量:
● 绝对计量系统(由位于葡萄牙里斯本的INETI机构开发),提供了两个干涉仪臂之间光学路径差的实际数值,分辨率较低。
● 相对计量系统(由位于意大利都灵的Alcatel Alenia Space Italia开发),提供了干涉仪臂之间光学路径差的变化(相对于给定初始值的变化),分辨率较高。
两种计量系统都利用光学干涉仪原型进行光学干涉,利用控制系统对延迟线发出指令进行电子学层面的交互。
绝对计量用来支持达到Michelson干涉仪的同相位条件,它是由干涉仪多个臂之间的光学路径达到相干距离范围之内而构成的,因此较高可见度的边缘模式在仪器的聚焦平面上形成。
相对计量提供了对OPL变化的测量,从一个给定的初始值开始(这个数值是在达到同相位操作之后的数值),这个数值被控制系统利通过电动延迟线的精调级用于固定边界图案(OPD 10 nm)。相对计量是基于Michelson 干涉仪计量的,具有纳米级别的分辨率。OPD 干扰需要在对象观测过程中进行补偿,它来自于热学负载或是发生在卫星内部的振动(例如方向控制系统)等造成的卫星结构变化,通过仪器结构,传递至干涉仪镜面。
同相位系统实验室演示器
同相位系统是望远镜设计最为关键的部分。为了测试并且演示同相位系统的概念,即将干涉仪臂之间的OPL 通过一个自由度的延迟线进行均衡,实现了一个实验室演示器。MIT演示器由一个简化的实验室尺寸的光学干涉仪原型组成,实现了与高分辨率卫星望远镜相同的光学配置拓扑。
由于同相位系统概念是要控制望远镜臂之间的OPD变化,同相位系统的实验室演示器带有一条控制延迟线(CDL)能够在(主要)臂上工作,它跟踪另一条(从属)臂的OPL 变化,还带有一条扰动延迟线(DDL)作用在(从属)臂上,和预测的体现在卫星望远镜上的扰动PSD 相似,引入具有相同功率谱密度(PSD)的OPL扰动。实验室演示器需要达到的性能必须与卫星望远镜要求的性能一致。
控制延迟线由两个执行器组成:一个粗调台式电动平移器和一个精调台式压电变换器。扰动线仅由压电变换器组成。粗调器用来从比较大的OPD(例如1 mm)开始达到同相位条件。精调器用来在达到同相位状态之后,控制并保持两个干涉仪臂之间的OPD。
同相位控制系统仅仅使用了相对计量测量,在闭环状态下驱动精调器的控制延迟线。粗调器的延迟线直接由操作员在开环下进行驱动,操作员观察在绝对计量监视器上,达到同相位条件所需要的位移。粗调器的执行器使用RS232 与便携式计算机进行连接。软件接口在NI LabVIEW 中实现,用于设置所有必要的参数,对执行器进行编程,并设置位移指令。执行器的绝对位置一直标识在图表中。控制粗调器执行器直至达到同相位状态。在下图中,显示了达到同相位状态的实验干涉图。
同相位控制系统硬件式基于便携式计算机的(带有2 GB RAM的Pentium 4 2.66 GHz),它通过IEEE 1394接口连接到便携式NI DAQPad-6052E端口上。即便这个类型的数据采集板卡并非实时设备,还是可以通过数字控制闭环,以1 ms 的控制步长进行控制(可见这并非硬实时性能)。干扰延迟线执行器使用相同的DAQPad-6052E 进行驱动。干扰发生算法与控制算法一起,并行运行在相同的便携式计算机上。
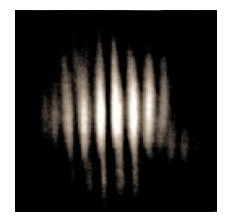
图2.达到同相位状态的实验干涉图
使用了两个ADC 通道和两个DAC 通道。这两个ADC 通道采集来自相对计量电子的两个信号,它们用于重建OPD 变化。一个DAC用于驱动精调器控制延迟线的压电驱动器,另一个DAC 驱动扰动延迟线的压电驱动器。
控制算法设计根据相同的模型观测器进行执行,它基于离散时间状态方程,直接用C 语言算法实现。控制算法程序被编译为动态连接库(DLL),通过调用库函数节点使用NI LabVIEW 与NI DAQ 板卡进行数据交换(来自ADC 的测量和发送至DAC 的指令)。这种解决方案可以测试控制算法(使用C 语言编写,十分接近最终实际使用的版本),从而可以非常方便地与实验室NI DAQ 硬件进行连接,而无需使用实际使用的硬件,这样就节省大量的时间和金钱。同样,扰动发生算法实现为离散状态空间方程,并且使用C++ 进行编写,编译为DLL 文件。图5 显示了控制系统的方块图。

图3.粗调器延迟线软件界面

图4.NI DAQPad-6052E 数据采集设备
由于我们的系统并非实时系统,我们设计了一个十分简单的软件界面,其中不含有图形和图形图标,避免载入控制算法的执行。软件界面包含了一系列按钮,可以用来启动或停止相对计量、扰动发生算法、控制系统算法,一组发光二极管用来指示控制系统的状态。所有重要的控制变量(测量、指令、状态变量等等)都存储在计算机的内存中,并在控制对话结束的时候以二进制格式存储在硬盘上。
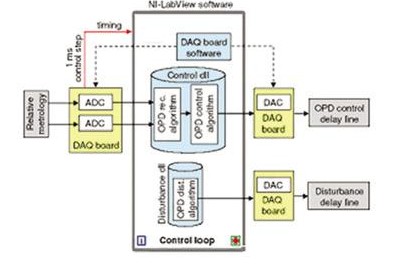
图5.控制系统方块图
测试结果十分理想,残余OPD 为σ =9.5 nm,满足了要求。图6给出了没有控制系统下的OPD 扰动(左图)以及控制系统作用下的OPD 残余量(右图)。
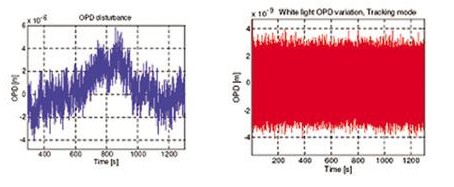
图6.控制系统测试结果
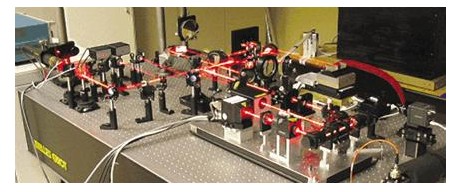
图7.Michelson 干涉仪测试台
为了提高同相位控制系统的性能,未来需要对控制系统硬件进行升级。在下一个开发中,希望使用NI 实时硬件和LabVIEW 实时模块软件将控制步长减少为0.1 ms,并对控制软件和控制算法进行一定的调整。
