Real-Motion® 驾驶模拟器保证了真实的赛车感觉。 不仅因为驾驶者坐在令人兴奋的汽车之中,而且还因为驾驶感非常写实,让驾驶者感觉自己的确身在真实的赛道之中。Real-Motion® 的开发商和制造商是 Steel Construction andRobotic Machinery(S.Co.R.E)。总部位于黎巴嫩阿姆希特的该公司专门经营应用于各种领域的动态运动模拟器。他们的赛车模拟器由 Beckhoff 基于 PC 和 EtherCAT 的控制平台控制。 该项目的实施由 Beckhoff 位于黎巴嫩的独家合作伙伴,Industrial Technologies S.A.L.(ITEC)提供支持。

Real-Motion® 的赛车模拟器保证了振奋和乐趣: 它完美地模拟了真实赛车的操控。
“2010 年之前,S.Co.R.E 的所有驾驶模拟器都装配的是传统 PLC 系统。但是,我们开发 Real-Motion. 时遇到了技术水平的限制”,Gaby Mike,Real-Motion 的总裁解释道。本项目最大的挑战便是需要创造能够对外部赛车发动机数据做出实时反应的精确同步运动控制平台。其它的要求还包括客户特定运动曲线的数学计算以及模拟器运行时改变目标点的可能性。
更高的以太网数据传输能力
“选择 Beckhoff 的决定性标准是其基于 PC 的控制平台的开放性以及高数据传输能力,”Industrial Technologies 的总裁 Jad Wehbe 说道。“在这里用作为控制器的 Beckhoff C6915 控制柜工业 PC 具有集成式的双以太网适配器。服务器上多个模拟器的同步通过以太网进行。只有通过高速以太网,我们才能实每秒高达 200 数据包的数据传输量,”Gaby Mike补充道。由于使用了以太网和 UDP 数据包,我们便可以使用更长的数据线和无限量的网络节点。
赛车模拟器的运动基于独立轴间的插补。因此,它们同步时的每次延时都会导致各方向上不需要的移动。Beckhoff 的实时以太网总线系统,EtherCAT,以及其分布式时钟功能为各种驱动器的精确同步创造了条件。
调整伺服电动机使其适应客户特定的移动曲线
考虑到操作者的动作,车辆模拟器中的移动目标点必须由伺服电机快速驱动。作为 NC PTP 数据包组件的外部设定点生成器已扩展了 TwinCATNC PTP 自动化软件中的传统设定点生成器。在结构化文本的帮助下,用于外部设定点生成的计算被编程到标准 PLC 中。 因此,客户特定移动的复杂计算(优化 7 段法)与 NC PTP 标准算法的结合就非常的简单。这样就可以很容易地解决目标点的动态变化。由于基于 PC 的平台具有高性能,新设置点数值的复杂数学算法就能够得以实时计算。
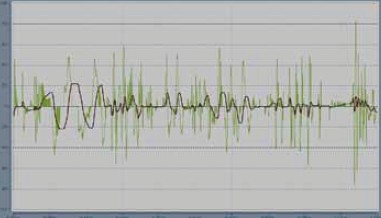
黑线:要求的目标点,绿线:速度曲线,红线:实际位置
TwinSAFE 改进了安全性功能安全性是运动模拟器很重要的一个方面。考虑到急冲和减速限制,如果按下紧急按钮,模拟器就必须立即停止。“由于有了 TwinSAFE 模块 EL6900和 EL1940,我们便能够保证急停按钮的故障安全功能”,Real-Motion 的总裁说道。
